|
ຖ້ອງ
|
ແບບ / ປະເພດ
|
ສັນຍາລັກ
|
ລາຍລະອຽດການເຮັດວຽກ
|
pneumatic ເຫມາະ
|
ວາວຄວບຄຸມອາກາດເຮັດວຽກແນວໃດ?
|
ສະຖານະການທີ່ປົກກະຕິ
|
|
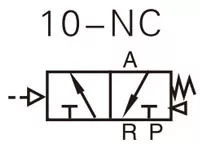
ຊຸດ 3A (3/2 ທາງ)
|
10-NC (ປິດປົກກະຕິ)
|
|
ທົດລອງໃນ: p → a
ການທົດລອງປິດ: A → r (ສະຫາຍ)
|
3 ກ110-M5 / 06: PC -01 (G1 / 8) X2 Silep, Silence G1 / 8 X1
3 ກ210-06 / 08: PC -02 (G1 / 4) X2 Piece, Silence G1 / 4 X1
3 ກ310-08 / 10: PC -03 (G3 -03 (G3 / 8) X2 X2, Silence G3 / 8 x1 ສິ້ນ
3 ກ410-15: PC -04 (G1 / 2) X2 Silep, Silence G1 / 2 X1
|
ການກັບຄືນພາກຮຽນ spring:
NC / ບໍ່ມີຫຼັບ: ປະຕິບັດຕົວຈິງໃນເວລາທີ່ມີສັນຍານອາກາດ; ຕັ້ງຄ່າໂດຍກໍາລັງພາກຮຽນ spring ເມື່ອສັນຍານຖືກຍ້າຍອອກ.
|
ການຄວບຄຸມກະບອກສູບແບບດຽວ
•ລະບົບລະບາຍອາກາດ / ລະບົບຄວາມເຢັນ: ລະເບີດໃນເວລາທີ່ມີສັນຍານ, ຢຸດເມື່ອບໍ່ມີສັນຍານ
•ການປ່ອຍຄວາມກົດດັນທີ່ຍັງເຫຼືອ (ຄວາມປອດໄພ):
ປິດວົງຈອນອາຍແກັສທັນທີຖ້າແຫຼ່ງສັນຍານຈະສູນເສຍໄປ.
|
|
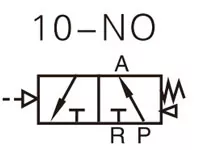
10- ບໍ່ (ປົກກະຕິເປີດ)
|
|
ທົດລອງໃນ: A → r (ສະຫາຍ)
ການທົດລອງປິດ: p → a
|
|
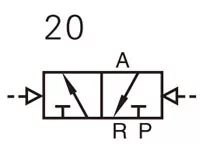
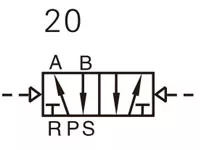
20 (ການທົດລອງ Double)
|
|
ສັນຍານ 1: ການທົດລອງໃນ: p → a
ທົດລອງໃນ: A → r (ສະຫາຍ)
ສັນຍານທີ 2: ການທົດລອງໃນ: A → r (ສະຫາຍ)
ການທົດລອງປິດ: p → a (Air in)
|
|
ປ່ຽງຄວບຄຸມທາງອາກາດແມ່ນຫຍັງ?
ຫນ້າທີ່ຄວາມຊົງຈໍາ: ວາວພັກຢູ່ໃນຕໍາແຫນ່ງທີ່ປ່ຽນຢູ່ຄັ້ງສຸດທ້າຍເຖິງແມ່ນວ່າສັນຍານຈະຖືກກໍາຈັດອອກ. ຮຽກຮ້ອງໃຫ້ມີສັນຍານຕໍ່ຕ້ານການຕັ້ງຄ່າໃຫມ່.
|
ວົງຈອນເຫດຜົນ Pneumatic (ບໍ່ແມ່ນໄຟຟ້າ)
•ສັນຍານທີ່ຖືສັນຍານ
•ການຄວບຄຸມປະຕູຮົ້ວຂອງ Hopper (ເປີດ / ຖື / ປິດ)
|
|
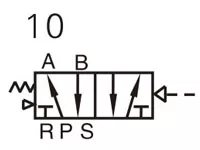
ຊຸດ 4A (5/2 ທາງ)
|
10 (ນັກບິນດຽວ)
|
|
ທົດລອງໃນ: P → b, a → r
ການທົດລອງປິດ: p → a, b → s
|
4a110-M5 / 06: PC -01 (G1 / 8) x3 x3, Silence G1 / 8 x2
4a210-06 / 08: PC -02 (G1 / 4) x3 X3, Silence G1 / 8 x2
4a310-08 / 10: PC -03 (G3 -03 (G3 / 8) x3 X3, Silence G1 / 4x2
4a41010-15: PC -04 (G1 / 2) x3 x3, Silence G1 / 2 x2
|
ກັບຄືນສູ່ລະດູໃບໄມ້ປົ່ງ
ການຄວບຄຸມທິດທາງມາດຕະຖານ: ກະບອກສູບທີ່ມີສັນຍານ; ອັດຕະໂນມັດ retracts ໃນເວລາທີ່ສັນຍານຢຸດ.
|
ຄວບຄຸມກະບອກສູບສອງຄູ່
•ເຄື່ອງຫຼີ້ນອັດຕະໂນມັດ: ຂັ້ນຕອນຂອງກໍາມະກອນໃນປ່ຽງ pneumatic ຕີນເພື່ອໃຫ້ສັນຍານ, ແລະກະບອກສູບລົງ; ປ່ອຍຕີນຂອງທ່ານ, ກະບອກສູບຈະສົ່ງຄືນໂດຍອັດຕະໂນມັດ
•ປະຕູຄວາມປອດໄພຂອງ pneumatic: ປະຕູເປີດເມື່ອມີສັນຍານອາຍແກັສ, ແລະປິດທາງສັນຍານໂດຍອັດຕະໂນມັດເມື່ອບໍ່ມີສັນຍານ.
|
|
20 (ການທົດລອງ Double)
|
|
ສັນຍານ 1: p → a, b → s
ສັນຍານທີ 2: P → b, a → r
|
|
ປ່ຽງຄວບຄຸມທາງອາກາດແມ່ນຫຍັງ?
ການຄວບຄຸມກໍາມະຈອນ: ຮຽກຮ້ອງໃຫ້ມີພຽງແຕ່ກໍາມະຈອນເຕັ້ນສັ້ນເພື່ອປ່ຽນແລະດໍາລົງຕໍາແຫນ່ງ. ເຫມາະສໍາລັບການສົ່ງສັນຍານທາງໄກ.
|
ລະບົບລໍາລຽງຍາວ
•ການຮວບຮວມການກວດກາຄວາມຈໍາເປັນຄວາມຈໍາຂອງພະລັງງານ
•ກົນໄກການບິດເບືອນ: ຫຼັງຈາກກະບອກກະບອກໄປຮອດຕໍາແຫນ່ງສຸດທ້າຍ, ມັນຍັງຄົງຢູ່ໃນສະຖານທີ່ໂດຍບໍ່ຕ້ອງລຸດລົງຖ້າແຫຼ່ງສັນຍານຈະຖືກຕັດອອກ
|
|
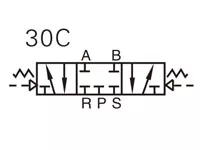
ຊຸດ 4A (5/3 ທາງ)
|
ສູນກາງ 30c (ປິດ)
|
|
ບໍ່ມີສັນຍານຫຍັງ: ພອດທັງຫມົດປິດ (A / B ຖືກບລັອກ)
ສັນຍານ 1: p → a, b → s
ສັນຍານທີ 2: P → b, a → r
|
4a130CEP-M5 / 06: PC -01 (G1 / 8) x3 x3, Silence G1 / 8 X2
4a230CEP-06/08: PC -02 (G1 / 4) x3 x3, Silence G1 / 8 X2
4a330CEP-08/10: PC -03 (G3 -03 (G3 / 8) X3 X3, Silepen G1 / 4x2
4a430CEP-15: PC -04 (G1 / 2) x3 x3, Silence G1 / 2 x2 ຊິ້ນ
|
ຢຸດແລະຖື
ກະບອກສູບຢຸດທັນທີໃນຕໍາແຫນ່ງປັດຈຸບັນຂອງມັນ (ເຮັດຫນ້າທີ່ຄ້າຍຄືເບກ).
|
ການຢຸດເຊົາສຸກເສີນ
•ຍົກຂອງແນວຕັ້ງ (ປ້ອງກັນການຢອດຢາ)
•ຕໍາແຫນ່ງກາງຈັງຫວະ
|
|
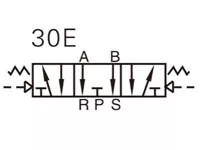
30e (ສູນຫາຍໃຈ)
|
|
ປິດວົງຈອນອາຍແກັສທັນທີຖ້າແຫຼ່ງສັນຍານຈະສູນເສຍໄປ.
ສັນຍານ 1: p → a, b → s
ສັນຍານທີ 2: P → b, a → r
|
ການເຄື່ອນໄຫວຟຣີ
piston ຈະສູນເສຍຄວາມກົດດັນແລະສາມາດຖືກຍ້າຍອອກດ້ວຍມືດ້ວຍມື.
|
•ກົນໄກການບິດເບືອນ: ຫຼັງຈາກກະບອກກະບອກໄປຮອດຕໍາແຫນ່ງສຸດທ້າຍ, ມັນຍັງຄົງຢູ່ໃນສະຖານທີ່ໂດຍບໍ່ຕ້ອງລຸດລົງຖ້າແຫຼ່ງສັນຍານຈະຖືກຕັດອອກ
•ການປ່ອຍຄວາມກົດດັນທີ່ຍັງເຫຼືອ (ຄວາມປອດໄພ):
• "ການສະຫມັກສະຫມັກ: ກົນໄກການຕິດຕາມ: ໃຊ້ໃນເວລາທີ່ກະບອກສູບຕ້ອງການຍ້າຍອອກໄປຢ່າງເສລີແລະຕິດຕາມກໍາລັງພາຍນອກ.
|
|
|
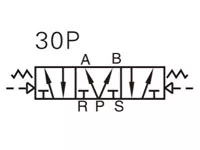
30p (ສູນຄວາມກົດດັນ)
|
|
ບໍ່ມີສັນຍານ: P → A, B (Pressurized)
ສັນຍານ 1: p → a, b → s
ສັນຍານທີ 2: P → b, a → r
|
equilibrium / ຂະຫຍາຍ
ຮັກສາຄວາມສົມດຸນຂອງຄວາມກົດດັນ (ຫມາຍເຫດ: ກະບອກສູບດ່ຽວຈະຄ່ອຍໆຂະຫຍາຍອອກ; ຖ້າມັນເປັນກະບອກສຽງສອງໃບ, ມັນຍັງຄົງຢູ່ໃນສະພາບທີ່ສົມດຸນ.).
|
ລະບົບການດຸ່ນດ່ຽງຄວາມກົດດັນ
•ການປ້ອງກັນການປະຕິເສດໃນການຕັ້ງຄ່າຕັ້ງແນວຕັ້ງສະເພາະ (ໃນເວລາທີ່ຕິດຕັ້ງຢູ່ຕັ້ງຫນ້າຈໍທີ່ຫັນຫນ້າລົງ, ກະບອກສູບທີ່ແຕກຕ່າງກັນເພື່ອຕ້ານກັບແຮງໂນ້ມຖ່ວງແລະປ້ອງກັນຄວາມຫນ້າກຽດຊັງ.
|



















